
Is your tiny robot really all that small if it's bigger than the width of a coin? A team of scientists has built what is now the smallest-ever remote-controlled walking robot, coming in at a mere half a millimeter (less than a fiftieth of an inch) wide.
Exceedingly tiny robots have a whole host of potential uses, from helping out with surgical procedures to repairing machinery in spaces where a wrench can't fit. The smaller they get, the more scenarios they could be used in.
This bot, while not ready to start going out there in the world and doing repairs just yet, is truly impressive.
It looks and moves like a miniature peekytoe crab, a shape chosen on a "creative whim", according to the researchers. The techniques they've developed can in fact be used to develop tiny robots in just about any shape required.
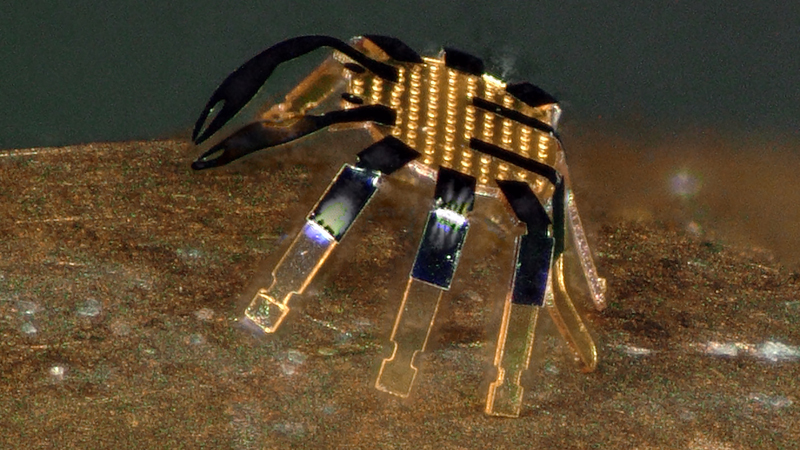 The robot is manipulated using lasers. (Northwestern University)
The robot is manipulated using lasers. (Northwestern University)
"Our technology enables a variety of controlled motion modalities and can walk with an average speed of half its body length per second," says mechanical engineer Yonggang Huang, from Northwestern University in Illinois.
"This is very challenging to achieve at such small scales for terrestrial robots."
The technology the robot is based on was originally developed eight years ago and isn't unlike a pop-up book: robot parts are fixed to a stretched rubber substrate, and when the material is relaxed, the device pops up into its shape.
By carefully calibrating the base pieces, the robot shape can be precisely controlled. A similar approach is used with the robot's moving parts, which are made from a shape-memory alloy material. These materials switch between two different shapes depending on whether or not they're being heated.
Lasers, acting as the remote control, are used to heat specific parts of the robot – as those parts morph into a different shape, they propel the crab forward. There's no need for a power source or an engine, and a thin glass layer ensures the components go back to their original shape as they cool.
"Because these structures are so tiny, the rate of cooling is very fast," says materials scientist John Rogers, from Northwestern University. "In fact, reducing the sizes of these robots allows them to run faster."
By aiming the lasers at different sections of the robo-crab, the researchers are able to set the direction of locomotion. By adjusting the frequency of the laser scanning, the speed of movement of the robot can be modified, too.
This is the next step in a trend that has seen robots get smaller and smaller over time, whether that's to make them more resilient to external forces, to target drugs to treat diseases, or to build up larger, modular structures from smaller parts.
The researchers say there's plenty of potential in their new process: they can get robots to turn and jump using the same techniques, for example. As long as the robot is within a line of sight to the laser, it can be manipulated remotely.
"Robotics is an exciting field of research, and the development of microscale robots is a fun topic for academic exploration," says Rogers.
"You might imagine micro-robots as agents to repair or assemble small structures or machines in industry or as surgical assistants to clear clogged arteries, to stop internal bleeding or to eliminate cancerous tumors – all in minimally invasive procedures."
The research has been published in Science Robotics.