
Whiskers on cats and other mammals aren't covered with sensors. Instead, the sensing is done at the base of the whisker, hidden inside a small follicle, and scientists just discovered a lot more about how this biological transmission works.
Getting into the follicle to take a look at the base of whiskers would interfere with the whole setup, so a new study explores a first-of-its-kind mechanical simulation of how whisker sensing works.
Combined with some anatomical observations of rats, the simulation shows that the base of the whisker gets converted into an 'S' shape as it's touched – and this 'S' shape then pushes and pulls certain sensor cells to tell the brain what's happening.
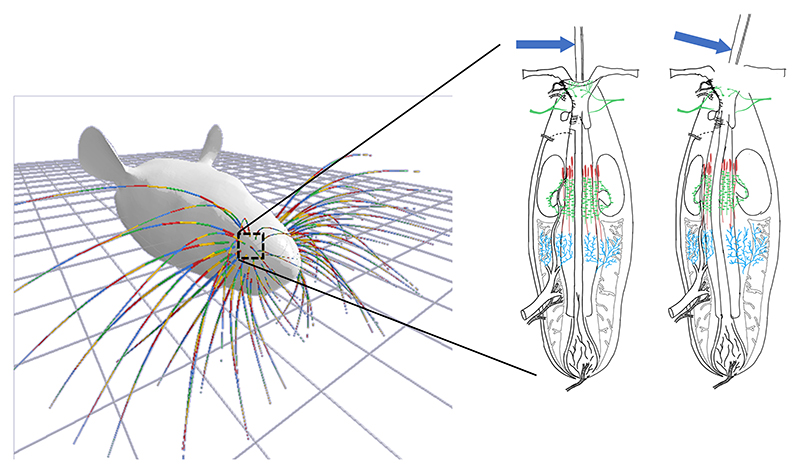 A whisker deformation profile from the study. (Yifu Luo and Nadina Zweifel)
A whisker deformation profile from the study. (Yifu Luo and Nadina Zweifel)
"The part of the whisker that triggers touch sensors is hidden inside the follicle, so it's incredibly difficult to study," says Mitra Hartmann, a professor of biomedical engineering from Northwestern University.
"By developing new simulations, we can gain insights into biological processes that cannot be directly measured experimentally."
While the model is a simplified version of reality, and only uses a limited set of data taken from extracted rat whiskers, it nevertheless gives scientists some helpful insights into how whiskers get used to sense a surrounding environment.
The research required expertise from a wide variety of scientific fields, including neuroscience and continuum mechanics. Part of the mechanical model involved the application of beam theory, which is often used in engineering and geology to work out how bending materials or entire tectonic plates might interact with each other.
Here, beam theory was applied to the interaction of the whisker and its follicle. The team discovered that the change in shape of the whisker – in many ways "just a deformable beam interacting with springs" – was likely to be the same whether it was actively pressing against something or passively being touched by something else.
"Our model demonstrates consistency in the whisker deformation profile between passive touch and active whisking," says mechanical engineer Yifu Luo, from Northwestern University.
"In other words, the same group of sensory cells will respond when the whisker is deflected in the same direction under both conditions. This result suggests that some types of experiments to study active whisking can be done in an anesthetized animal."
While this study only looked at rats in terms of actual biological observations, the scientists think the findings will apply to all whiskered mammals to some extent, though there are likely to be differences along the way too – rats use their whiskers much more as local scanners than cats do, for example.
What's more, the research could also inform the development of artificial whiskers to be used in robotics. Whiskers can act as finely tuned detectors of what's around an animal, operating at a range of frequencies, and that's a useful framework to copy.
And while we don't have whiskers of our own, the team thinks research into human touch will benefit from this study as well. There's still lots more to discover about how we interact with the world through this particular sense, and the 'S' bend produced by whiskers could be seen as a new way into understanding it.
"The sense of touch is incredibly important to nearly everything we do in the world, yet it is very difficult to study touch using hands," says Hartmann. "Whiskers provide a simplified model to understand the complex, mysterious nature of touch."
The research has been published in PLOS Computational Biology.